{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
完成日期
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.tutorial.upload_filename }} | Attached File | {{ post.file.upload_filename }} |
ㆍ 研究产品: 龙门系统
ㆍ分析目的: 建 立线性抓取轴的数字孪生模型分析其结构振动
产品的轻量化具有节能、产品效率提高的优点. 但因结构刚度、结构振动 会影响位置精度。因此,为了保持产品的高精度,需要更深入地了解系对系统作用的力和动作间的复杂关系。因此,总部位于瑞士的工业自动化机器人制造商 Güdel (Güdel) 决定使用柔性体多体动力学软件RecurDyn改进开发过程。
仿真过程
① 为了缩短仿真时间,使用最少的参数对龙门系统进行建模
② 基于线性模态的柔体(RFlex)被来建立脚架和机架的模态组合模型
③ 轴用beam单元建模,工具中心位置用刚体建模
④ 使用 RecurDyn 的机床工具包,可以更加高效准确地仿真齿轮齿条 的力与运动之间的复杂耦合
关键仿真技术
ㆍ MFBD分析技术,可考虑系统的变形,以评估系统的位置精度和振动
ㆍ 可以更加方便的对Güdel机器多种配置进行任意组合建模

抓取轴的数字孪生模型分析
工具包
ㆍRecurDyn/Professional
ㆍRecurDyn/RFlex
ㆍRecurDyn/RFlexGen
ㆍRecurDyn/Machine Tool
工程问题
• 需要采用新方法来应用和评估新的设计,同时减少昂贵样机生产
• 为了更好地了解复杂运动和力引起的振动,同时达到所需的位置精度水平, 必须对系统的各个要素进行建模
解决方案
• 利用RecurDyn的Rflex和 MachineTool, 简化整个系统 执行过程建模和仿真, 并取得与实验数据相匹配的结果
• 利用RecurDyn可以很轻松地对所有元素建模,从而预测系统的行为
结论
• 对以前不太了解的因素得到了充分的理解。 结合仿真和对龙门系统实验的结 果,改进产品设计
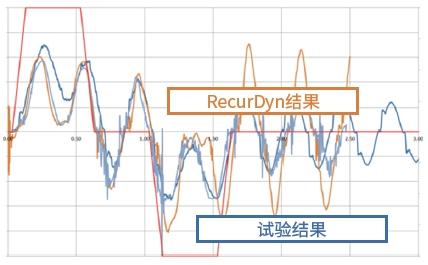
• 使用RecurDyn计算驱动力曲线
• 使用预定义的加速度设定点(红色),研究了不同的参数设置,并与实验测量值(蓝色)进行了比较
其他应用场景
ㆍ检查带有控制系统的机器人手臂动力学行为
ㆍ分析机器人各主要部位的振动和载荷,保证生产过程的稳定性
ㆍ在结构分析中改变机器人系统的设计或执行器的操作条件,从而改变种负载条件,并进行仿真
◀ 使用RecurDyn/MachineTool进行圆度测试
ㆍ支持标准操作,如 ISO 圆度测试
ㆍ电机和控制器共同建模的仿真
ㆍ滚珠丝杠传动、直线导轨和轴承的分析

