{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
完成日期
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.tutorial.upload_filename }} | Attached File | {{ post.file.upload_filename }} |
四列履带车辆的回旋性能研究
<客户信息>
• 客户名称: 韩国海洋研究院海洋系统安全研究所
• 主要工作: 海洋科学技术研究
<课题>
• 左/右双轨分两列增加车辆宽度
<使用的产品>
• RecurDyn/Professional
• RecurDyn/Track_LM
<效果>
• 4建立热履带车辆的动力学模型,通过仿真预测其转弯性能
==========================================================================
深海底淤积地基由具有很高含水率的微细颗粒组成,存在地基支撑力(Bearingcapacity)很弱的问题。由于这种微弱的地基支撑力,将商业生产所需要的每小时最多达500吨的锰结核用集矿系统运送出去是很难完成的,我需要Continuousmining通过阳光管连续采矿到海上采矿船。
因此,连续采矿系统由海上采矿船,扬矿管,中间缓冲管,柔性管和自航式集矿器组成,采矿系统最低端的集矿器运用是以整个采矿系统的综合位置控制为前提的。而且由于深海沉积层的剪切强度很低,为了使聚光器以预定的速度在计划的采矿路径上运行,保持聚光器-柔性管-缓冲器的相对位置一定,这需要整个采矿系统的综合运用。深海集矿机需要在水深5000m海上进行远程控制和综合运用,目前正在基于建模-仿真技术进行开发,首先开发了用于试验集矿机动态仿真的解析模型。
此外,行驶在深海软弱地基上的试验聚光器为了降低接触地面的接地压力,采用了接地面积大的轨道。但是,由于使用幅度较大的轨道,可能会导致轨道的变形,试验集矿机前装的采集装置会形成单臂梁形式,从而产生结构问题。为了增加深海集矿器采集容量,必须将多个可积的采集装置安装在深海聚光器前端。在这种情况下,为了提高安装采集装置的空间和结构可靠性,必须将左/右两侧轨道分成两列,以增加车辆的宽度。
本例旨在对左/右双轨双列分离模型进行数值求解,分析轨道与轨道间幅比的旋转性能;数值解采用深海软弱地基模型的RecurDyn,观察了左或右轨道速度比以及左/右轨道车辆的回旋比,四列轨道宽度变化带来的行驶性能变化。
Case Study
1) 试验聚光器模型
» 试验用实际模型
试验用实际模型近岸海域采矿装备性能实证试验用聚光器为框架(Frame),电子设备(Electronicequipments),破碎机(Crusher),采集设备(Pick-updevice),浮力材料(Buoy),行驶设备(Tracksystem)等组成,相当于实际模型(深海商用聚光器)容量的1/10。
一边的履带行驶装置是由车架,3个上部辊,11个下部辊,履带链接,花键和驱动马达,履带和张力调节装置,履带底部等组成,使用了132个合成树脂材质的履带底部(宽130毫米,长1100毫米,重10公斤,比重1.183)。此外,履带外侧链轮与空转轮轴之间的间距为3330毫米;总高度880mm,宽度1100mm。

»试验用虚拟样机
以试验用实际模型在RecurDyn中动态行为仿真为目的,将锰结核采集部分采集装置的刮板部分作为一个刚体进行了建模。
通过改变现有的履带模型对四列履带车辆进行了建模,四列履带车辆的行驶装置宽度与现有行驶装置的宽度相同。总共使用了109个刚体和240个履带链接,76个旋转接头,2个并进接头,36个固定接头,行驶装置的履带链接之间使用了缓冲部件(Bushingelement)连接。然后,在链轮和履带链接,负载轮和履带链接,空转轮和履带链接,支承辊和履带链接之间使用了接触元素(Contactelement)。
2) 地基力学
土壤地基反力大致可分为竖向应力和剪切应力。竖向应力表现为车辆的地面压力;由垂直下沉的压力-下沉之间的关系式可以求得,剪切应力由车辆地面产生的剪切位移引起。剪切位移在车辆驱动下接触地面部分产生的滑动速度随时间的积分。
3) 反复载荷
荷载起作用的路段可以由关联式对沉陷进行竖向压力求解,对反复荷载作用的unloading和reloading路段的竖向压力-沉陷曲线可以假设为直线的形式来定义。
4) 流体阻力
以履带车辆的流体阻力使用船舶的动力学理论为基础进行了计算,为了观察行驶在海底软弱地基上的履带车辆的性能,利用了对在水中缓慢运动的物体的流体力。
5) 数值仿真
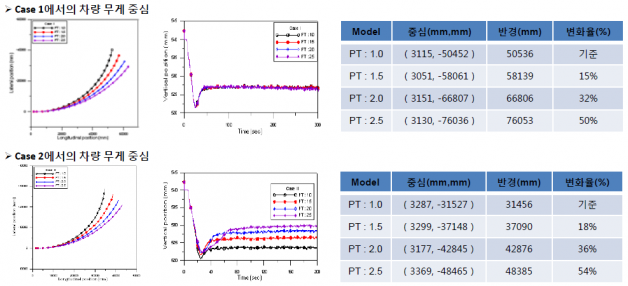
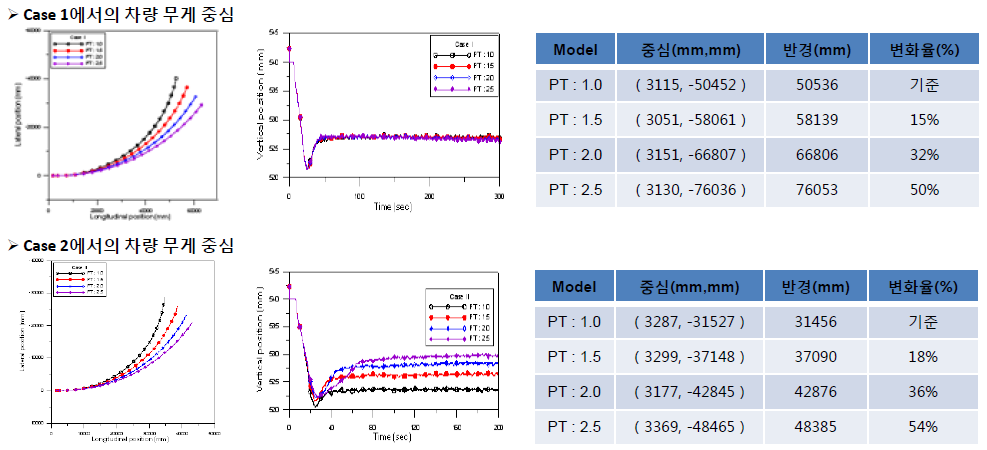
模型轨道间的节距(PTT:1.0,1.5,2.0,2.5); 通过改变steeringratio(1.1,1.2和1.4)进行了数值仿真;由于4列轨道的关系,左侧轨道和右侧轨道各有2个,每对2个,所以左右各有1对轨道用于同一速度时(Case1)和左右各有1对轨道应用不同速度时(Case2)分别进行了数值求解。
效果
在左右各履带速度一定的情况下(CaseI),发现随着螺距的增加,回旋半径增加,垂直下沉没有大的变化。即使在左右履带速度线性增加的情况下,也可以看出随着节距的增加,回旋半径也会增加,但随着节距的增加,垂直下沉的减小与CaseI不同。 这是由于回旋半径的增加,车辆的侧向剪切位移引起的滑移下沉量减少,这被认为是由于回旋半径的增加造成的。当回旋比相同,轨道间螺距值相同时,左右轨道速度一定时(CaseI),回旋半径小于轨道速度线性变化的情况(CaseII)。
*本内容是对2009 RecurDynUser’s Conference发布资料的整理。

{kind=link}