{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
完成日期
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |
什么是RecurDyn/DriveTrain?
RecurDyn/DriveTrain是基于RecurDyn的解决方案,它可以轻松的对包括齿轮,轴承和轴等在内的转动系统的各种元素进行建模和仿真。
RecurDyn/DriveTrain包含齿轮(GearKS), 轴承(BearingKS)和轴(Shaft)三个工具包。借助专用工具包中的建模工具,求解器和后处理等功能,用户可以轻松的建立传动系统并进行仿真最终得到结果。

另外,GearKS和BearingKS是通过我司与Gleason公司的KISSsoft联合开发的。由此,使用RecurDyn的动态分析求解器与KISSsoft的Gear Analytic Contact以及丰富的轴承库来降低进行噪声和振动评估时所需齿轮系统的传递误差。使工程师可以快速,准确的计算各种结果。

RecurDyn/DriveTrain中主要使用的接触单元
本段部分内容介绍RecurDyn/DriveTrain中GearKS使用的接触单元。
特别是在使用GearKS时最常用的GMM(Gear Meta Model)接触进行说明。
在进行齿轮仿真时,齿轮间的接触非常重要。使用GearKS建模的齿轮可以通过多种方式定义接触。其中,GearKS的对话框提供了三种类型的选项。

Gear Force Type的三种类型
1. Inactivate
- 不需要使用KISSsoft进行接触计算
- 需要单独定义接触,例如Gear Involute Contact或 Geo Contact等接触。
2. KISSsoft Force
- 通过和KISSsoft进行联合仿真考虑齿轮的接触。
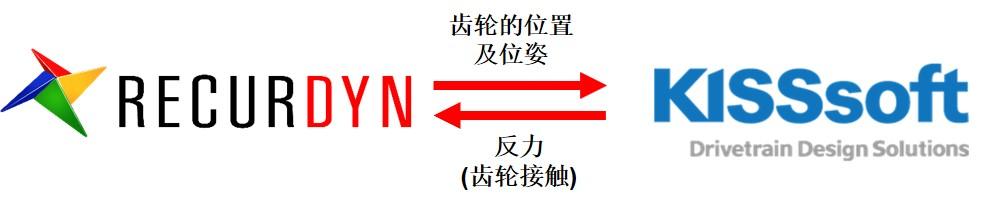
- RecurDyn每隔一个时间步长都会更新齿轮的位置和位姿,并将这些信息转达给KISSsoft后,RecurDyn内置的KISSsoft求解器开始计算齿轮接触,并将齿轮的反作用力传输回RecurDyn,在联合仿真的整个过程中一直反复进行。
3. KISSsoft Force(Meta Model)*推荐*

- 与在每个时间步长都与KISSsoft求解器进行数据交换的KISSsoft Force不同,提前创建一个齿轮元模型,之后借助它快速计算齿轮的接触。
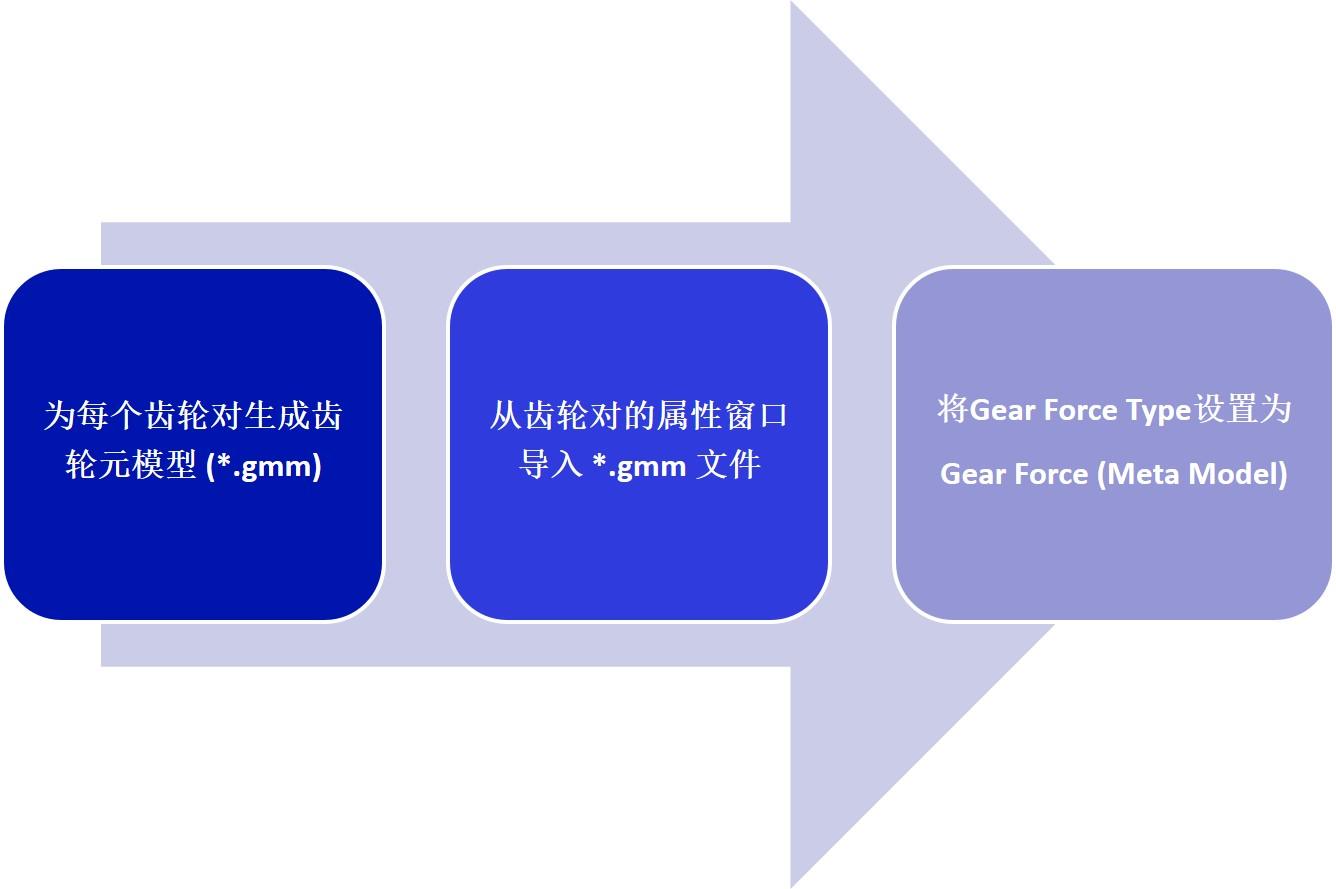
- 在仿真之前,计算与齿轮对的位置和位姿相关的六个参数的组合齿轮接触,并使用它来创建齿轮元模型。(GMM文件)
- 对于真实的动力学分析,可以使用GMM文件而不是KISSsoft求解器进行快速仿真。
- 创建齿轮元模型需要几分钟到几个小时的时间不等
- 齿轮的元模型可以重复使用
什么是齿轮元模型(Gear Meta Model)?
*元模型即替代模型(Surrogate Model),也称近似模型。
元模型是使用计算,测量结果以及插值模型对于多种设计变量的组合,可用于预测实际计算/未测量的组合值的一种模型。
RecurDyn/DriveTrain的KISSSoft Force(元模型)方法可以提前计算2~6个设计变量的齿轮力,并使用计算结果生成齿轮力的元模型。通过在实际仿真中使用此元模型(齿轮元模型),使齿轮分析时间大大的缩减。

用于生成齿轮元模型的6个参数
- 旋转角度
- 穿透
- 距离误差
- 轴向偏移
- 扭曲
- 倾斜
默认设置是仅使用两个参数(旋转角度,穿透)创建元模型。当两个齿轮都通过旋转副固定时,则无需考虑距离误差,扭曲和倾斜,根据齿轮的约束条件,通常不需要轴向偏移。
为了获得更精确的结果,建议使用所有的六个参数,但是,齿轮元模型生成时间也会因此有所不同。(它可能会因系统性能等存在差异)
- 考虑两个参数的情况:需要几分钟
- 考虑六个参数的情况:需要几个小时
齿轮元模型(Gear Meta Model)使用方法摘要
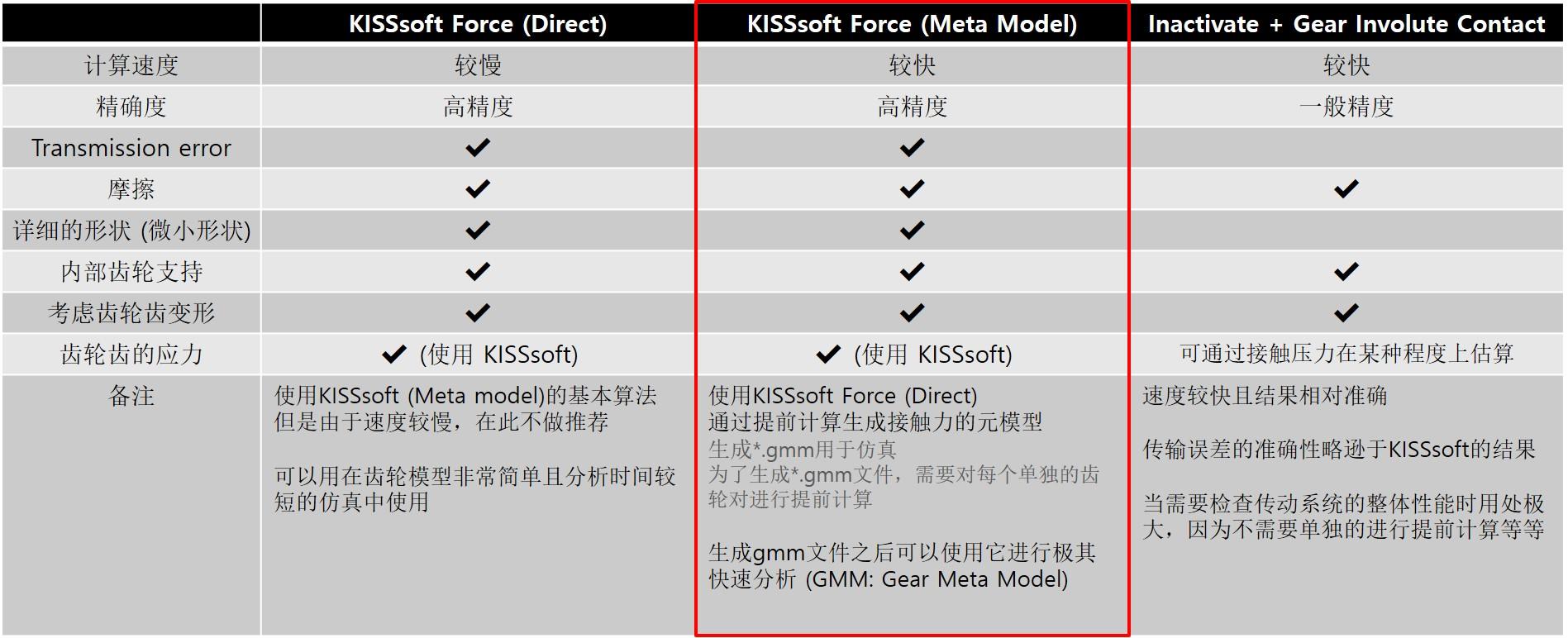
GearKS中常用的三种接触的比较
接触点类型选择指南
(对于使用GearKS建模的齿轮对应使用哪种接触?)
1. 推荐使用KISSsoft Force(元模型)
一般来讲,相比于KISSsoft Force(Direct),KISSsoft Force(Meta Model)的被使用性更为广泛。
- 我们可以认为KISSsoft Force(Direct)的精度要高一些,但是考虑到仿真时间的投入,精度的差异可以忽略不计。
- 对于简单的齿轮副分析的情况
- Direct方式需要数十分钟到几个小时
- Meta Model方式仅需要几秒到几十秒的时间
- 如果仅执行一个或者两个仿真,则KISSsoft Force(Direct)可能会更好,但实际进行分析的时候我们往往需要进行多组分析,因此建议使用KISSsoft Force(Meta Model)
生成齿轮元模型虽然需要些许时间,但是一次创建完成之后即可反复利用。
- 如果使用相同规格的齿轮对,则可用于不同的齿轮系型号或统一模型内的不同齿轮对。
- 大量的工程师采用在下班前按下创建按键,第二天拿到结果的方式进行分析
如果需要考虑以下部件,则建议使用KISSsoft Force(Meta Model),而不是Gear Involute Contact。
- 计算准确的传输误差
- 考虑齿轮的详细形态(微小形态)的计算
- 考虑齿轮变形
并且,KISSsoft Force(元模型)通常比Gear Involute Contact更为精确
2. Gear Involute Contact
- 如果需要检查传动误差或对齿轮的微观形状不是主要关注的对象的话,则推荐使用Gear Involute Contact检测宏观系统的性能
- 在不需要考虑微小形状的相关影响的情况下非常快速及准确
- 相比于齿轮的确切详细的结果,更加关注宏观行为的情况
- 但是如果已经设定了齿轮的规格,则建议使用KISSsoft Force(Meta Model)。
- 因为不需要单独的提前计算,所以使用起来相对方便
- 使用Gear Involute contact的时候需要将Gear Force Type首先设置为Inactive之后再单独定义。
- 需要齿轮工具包-与GearKS不同的工具包
3. 其他情况
如果需要使用柔性体齿轮的话,则需要使用Geo Surface Contact
- • KISSsoft Force和Gear Involute Contact不支持柔性体的仿真分析
